
Email:
Robotic 3D vision bin picking is a technology used in industrial automation to enable robots to locate, grasp, and pick up objects from a bin or container. The key components are:
1. 3D Vision System: This typically consists of one or more cameras that capture 3D data about objects in the bin, but for now, all you need is one sensor. Whether through stereo vision, structured light, or time-of-flight techniques, this provides information on the position, orientation, and shape of objects.
2. Bin Picking Algorithm: Software that analyzes the 3D data and determines the optimal grasping points and approach angles for the robot to pick up each object. This requires advanced computer vision and motion planning algorithms.
3. Robotic Arm: An articulated robot arm with dexterity to reach into the bin, align the gripper, and securely grasp the target object without colliding with other objects.
Robots are common enough in industry to perform repetitive tasks, but unorganized application environments are much more complex. This means that the robot cannot rely on a set program to continue its work, but needs to sense and analyze the environment so that it can then make a judgment.
Prior to the application of 3D vision, disorganized work tasks were often positioned using traditional tooling. This method cannot solve the problem of using one tooling to position different products.
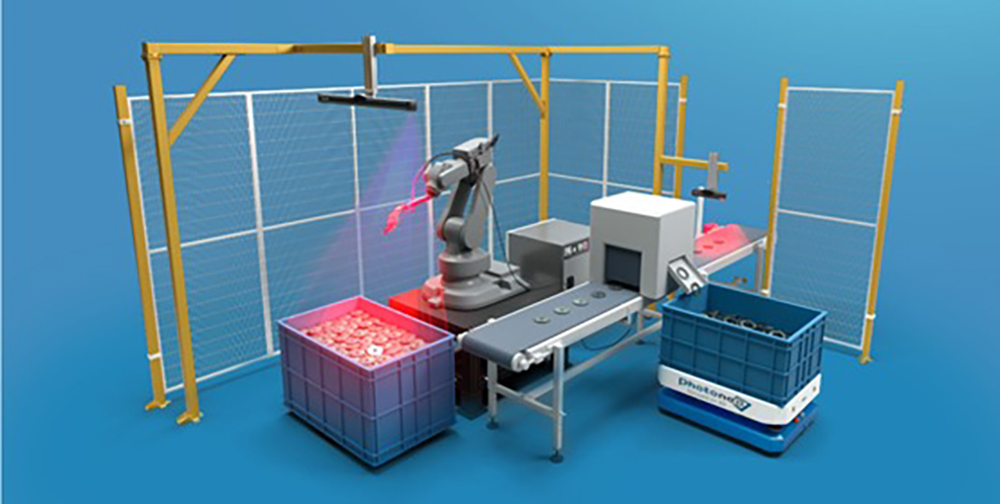
Let’s take a look at a video case of 3D disordered bin picking from Intsoft Technology:
With the rise of the electronics industry, there are more and more demands for disordered applications in industrial production. To solve this problem, 3D vision has become the best choice. It is specially designed for scattered and stacked workpieces to efficiently complete intelligent 3D bin picking and replace using traditional fixtures.
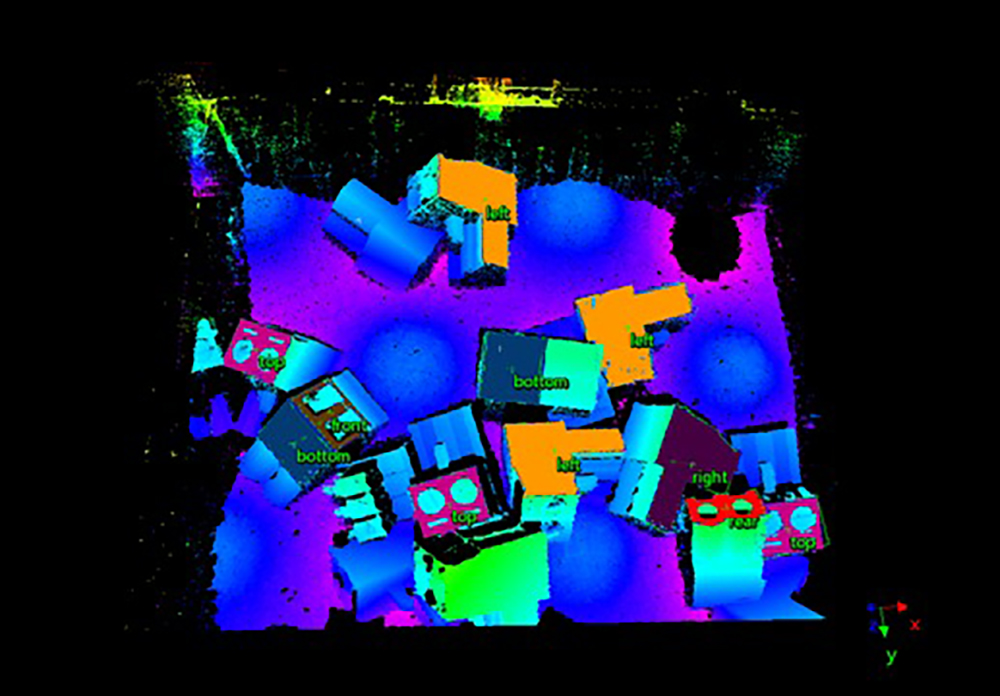
1. Detect every position and shape of any object
2. Detect unclassified parts in the box, pick them up with the robot and feed them to the production machine
3. Send the position of every detected part in the box to the robot.
With 3D matching, it is possible to configure the shape and position of any object before using just one 3D sensor.
Therefore, it can be used for picking complex shaped parts in an unorganized manner and is currently used in these directions, for example:
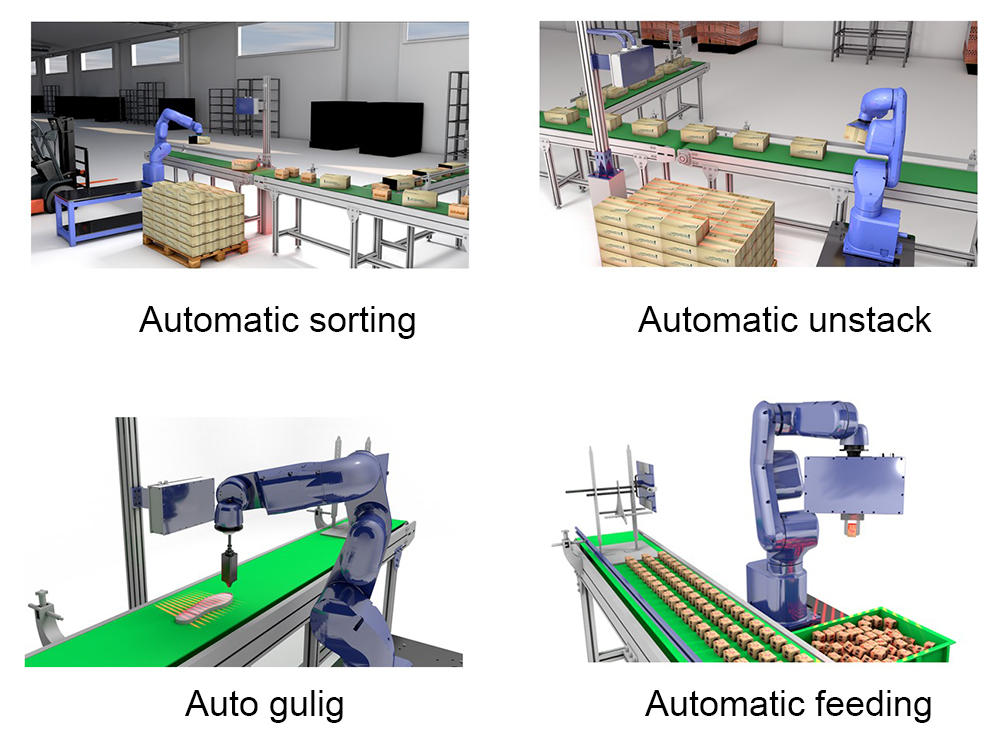
1. Robotic 3D positioning, picking and loading of various workpieces
2. 3D identification and positioning of stacked objects.
3. Flexible 3D positioning and picking of complex multi-faceted workpieces
4. 3D positioning and picking of large objects
5. 3D positioning of unorganized incoming workpieces
6. 3D positioning and picking of robot collaboration between multiple processes
7. Fast 3D positioning and picking of objects on conveyor belts
8. 3D identification and positioning of incoming workpieces by spraying robots
9. 3D positioning of robot assembly of large equipment
From the perspective of production and environmental adaptability, the direction of development in the next few years has a wider demand for 3D vision. This requires 3D cameras to scan the 3D data of the workpiece to help the robot quickly and accurately find the measured part and confirm its position, and guide the robot to accurately pick and locate the workpiece, so as to realize the flexible tooling of the automated production line of industrial robots.
And in terms of application expansion, in addition to intelligent bin picking, currently, robot 3D vision is also widely used in automated welding, automated cutting, automated assembly, automated palletizing and so on.
Intsoft 3D unorganized picking system can do more. We will always keep it updated.
In the future, we will gradually realize Intsoft 3D disordered gripping system applied to a variety of industrial fields in the desire to help more enterprises with less cost, achieve intelligence, automation, enable enterprises to light load, liberate human physical labor and let machines do it.

