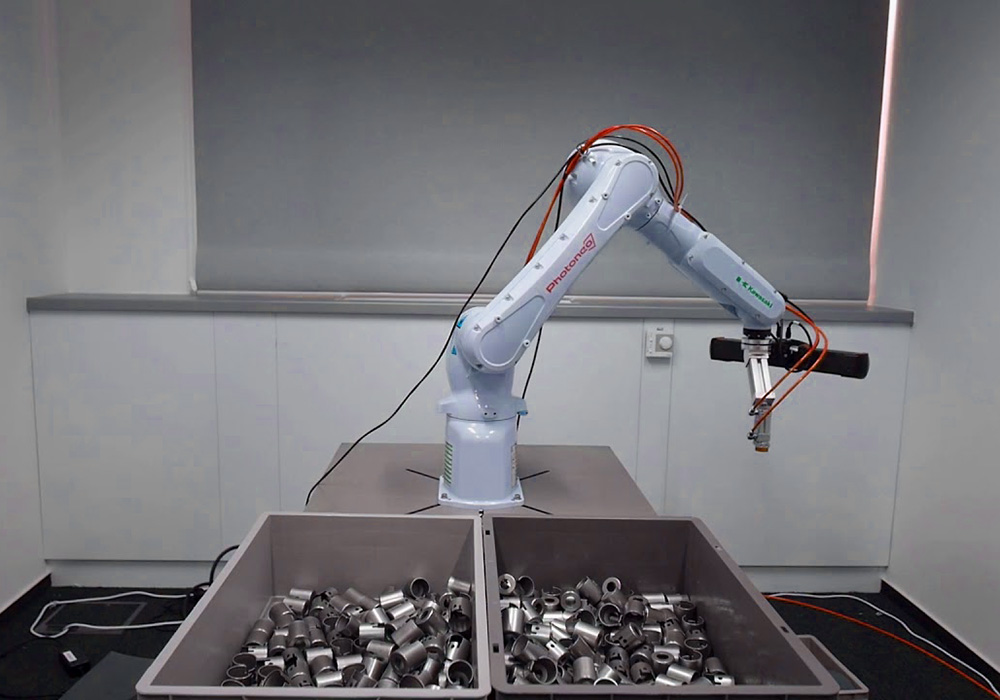
As automation continues to transform manufacturing and logistics, the need for advanced robotic systems capable of handling complex tasks has never been greater. INTSOFT TECH is proud to introduce its state-of-the-art Machine Vision System, designed specifically for 3D Vision Guided Robotics in random bin picking applications. This innovative integration allows robots to efficiently and accurately pick items from chaotic environments, increasing productivity and reducing operational costs.
Random Bin Picking Challenge
What is Random Bin Picking?
In many manufacturing and warehousing environments, items are often stored in bins or containers without any specific order. This randomness poses significant challenges for traditional robotic systems, which struggle to accurately identify and retrieve items. Manual picking methods can be labor-intensive and error-prone, resulting in inefficiencies and increased operational costs.
The Need for Advanced Solutions
To address these challenges, there is a growing demand for automated systems that can navigate and manipulate unordered environments. INTSOFT TECH’s Machine Vision System integrates advanced imaging technology with robotics to facilitate efficient random bin picking.
Features of INTSOFT TECH’s Machine Vision System
3D Vision Capabilities
The system uses high-resolution 3D cameras that capture detailed images of the items within the bin. This depth perception allows the robot to accurately assess the positions and orientations of various objects, regardless of their arrangement.
Intelligent Image Processing
Using advanced algorithms, the machine vision system analyzes 3D images in real time. This allows the robot to identify and classify items, even in cluttered environments. The system can distinguish between different shapes, sizes, and colors, ensuring accurate selection.
Dynamic Path Planning
Once the items are identified, the robotic arm calculates the optimal path for picking each object. This dynamic path planning minimizes movement and increases efficiency, allowing for faster picking cycles.
Real-time feedback mechanism
The integrated system continuously monitors the contents of the bin, providing real-time feedback to the robot. This capability allows for immediate adjustments based on any changes in the arrangement of items, ensuring reliability and accuracy.
User-Friendly Interface
Designed for ease of use, the system features an intuitive interface that allows operators to configure and monitor the picking process with minimal training. This simplification enhances overall operational efficiency.